

")
")
")
Návrh řešení HW 1.0
Pro novou ovládací jednotku jsem si stanovil tyto základní požadavky:
- Ovládat oba motory azimutu a elevace současně
- Možnost rozšíření na ovládání dalších prvků, například motor pro nastavení skew LNB
- Řídící jednotku umístit v těsné blízkosti rotátoru, vše ovládat přes ethernet, buďto kabelem nebo přes Wi-Fi
- Do elektroniky motorů nezasahovat. V případě neúspěchu půjde použít původní přístroj.
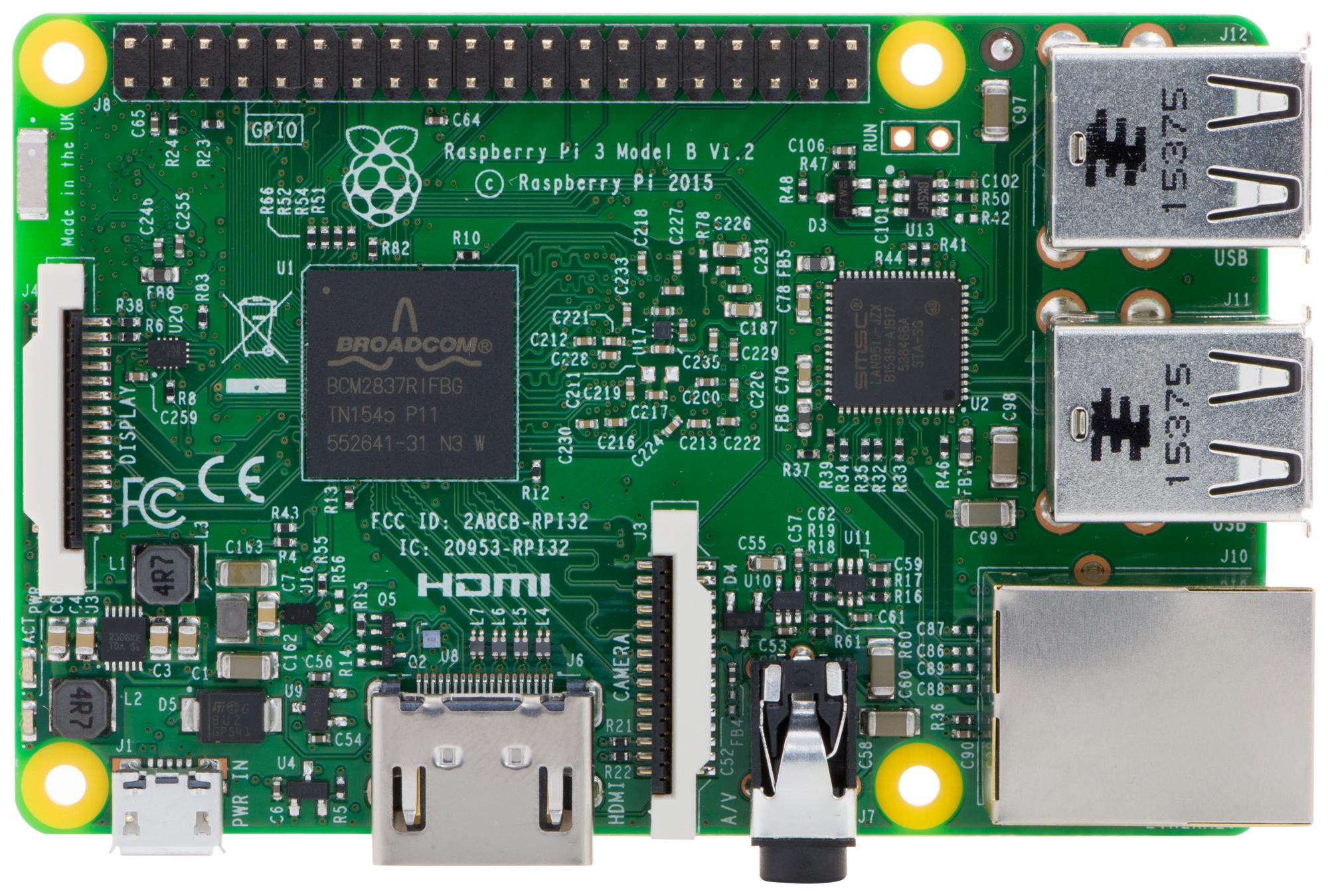
Už z těchto prvotních úvah bylo jasné, že volba padne na můj oblíbený počítač Raspberry Pi 3. Univerzální počítač umožňuje tvorbu jakéhokoliv softwarového vybavení a tedy i libovolných budoucích rozšíření. Konektor GPIO zase nabízí jednoduché rozhraní pro ovládání hardware rotátoru. Počítač je malý a lze jej umístit do vodotěsné krabice na stožár rotátoru. Do této krabice bude potřeba zavést pouze napájecí napětí 240V, takže v případě komunikace přes Wi-Fi žádný další kabel není potřeba. Pokud raději zvolíme komunikaci po kabelu, máme k dispozici podle normy ethernet propojení na vzdálenost až 85m. A nemusíme nijak dramaticky řešit rušení kabelů propojující rotátor a počítač umístěný v jeho těsné blízkosti (do 2m).
Mám trochu obavy, jestli takovýto univerzální počítač půjde využít k řízení hardware v reálném čase. Specializovaný operační systém pracující v reálném čase (například FreeRTOS) by bohužel potlačil hlavní výhodu Raspbery Pi, tedy jeho univerzálnost. Ale výkon počítače je poměrně velký, takže lze předpokládat, že na dostatečně rychlé reakce ovládacího programu bude stačit i běžný linuxový OS Raspbian.
Druhým konstrukčním blokem bude zdroj 24V. V dnešní době už lze koupit modul dostatečně malého, ale zároveň výkonného spínaného zdroje. Já jsem nakonec zvolil typ MEAN WELL LRS-75-24. Jeho rozměry jsou 99x97x30mm. Je schopen dodat až 75W, což je téměř dvojnásobek potřebný pro souběžný chod obou motorů. A má vnitřní ochrany pro přetížení, přepětí v síti a přehřátí.

Obr. 2 - Modul spínaného zdroje MEAN WELL LRS-75-24
Dále je potřeba rozhodnout, jakým způsobem se bude silové napětí 24V připojovat k motorům. Dnes už jsou k dispozici elektronické bezkontaktní součástky, přesto jsem nakonec zvolil klasická relé. Důvodem je galvanické oddělení 24V části od počítače Raspberry Pi a fakt, že bez ohledu na spínaný výkon nepotřebují chlazení. To by mohla být v létě výhoda. Nakonec jsem zvolil typ OMRON G2R-1-DC24 pro zapnutí / vypnutí motorů a OMRON G2R-2-DC24 pro změnu směru otáčení. Kontakty jsou schopné spínat proudy do 5A a ovládací napětí pro cívku 24V lze odebírat ze zdroje pro motory.
Zbývá vymyslet, jakým způsobem se budou konvertovat vstupní / výstupní signály mezi 24V logikou motorů a 3,3V logikou Raspberry Pi. V zájmu důsledného galvanického oddělení počítače od okolního HW budou použity optočleny. Pro spínání vinutí relé jsem vybral TLP627-4 a pro vstupy do Raspberry Pi to bude COSMO PC844. Tím jsou hrubé obrysy prototypu stanoveny.