

")
")
")
Erstausrüstung - Motorelektronik
Der mechanische Teil des EGIS enthält zwei Motoren. Leider sind sie noch nicht Schritt für Schritt. Es handelt sich um normale 24-V-Gleichstrommotoren mit einem Nennverbrauch von jeweils 18 W. Sie benötigen ungefähr 10 W ohne Last. Unter Last können sie jedoch mehr als 20 W aufnehmen, was berücksichtigt werden muss.
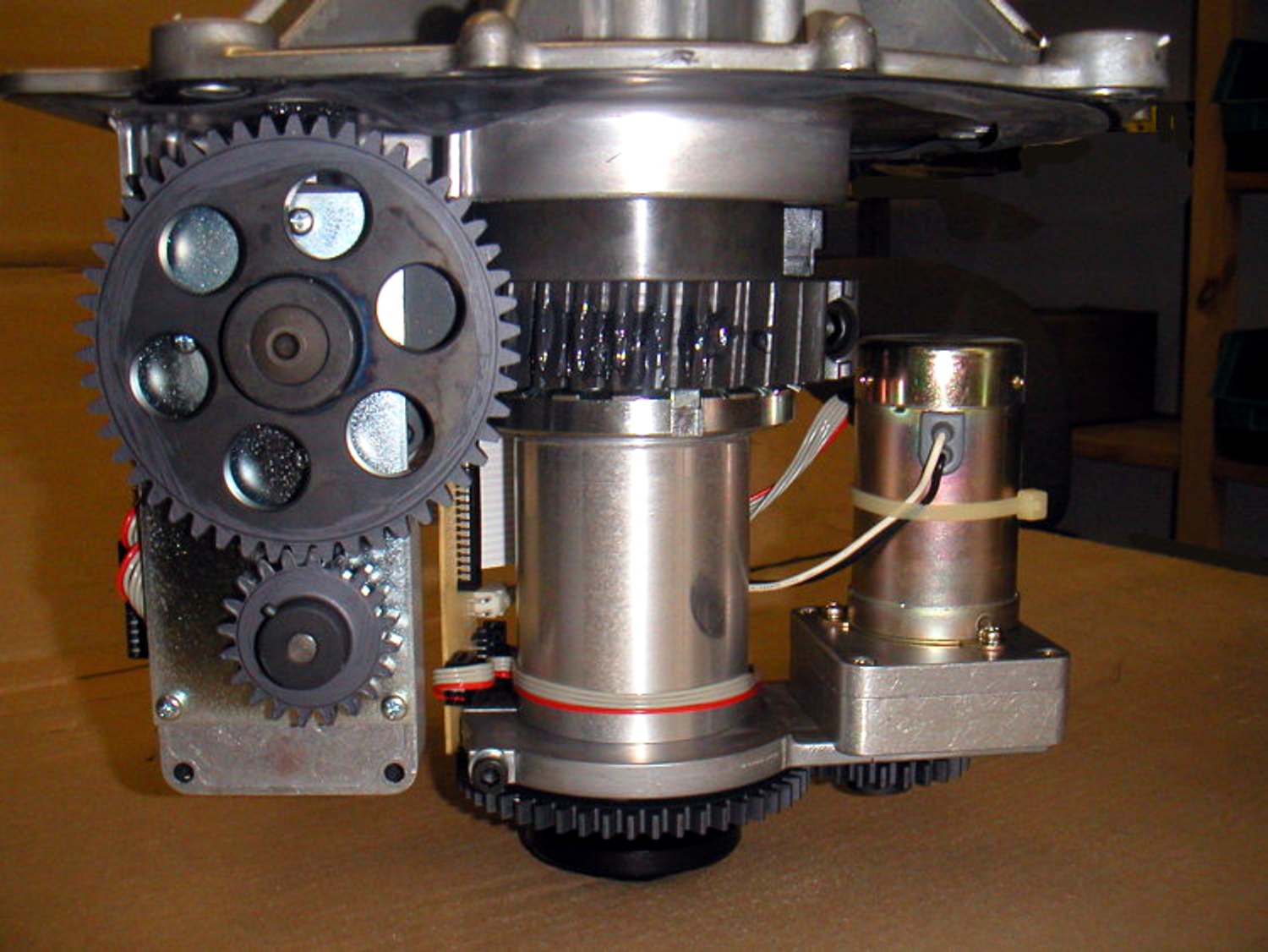
Abb. 1 - Blick auf die Motoren EPR-203
Rotationssensoren sind im Motorkörper integriert. In jedem Motor befinden sich zwei Sensoren. Sowohl für die Höhe als auch für den Azimut befinden sich im Gerät externe Endschalter, die die Ausgangsposition definieren. Wenn die Motoren nicht zu Hause sind, sind diese Schalter geöffnet. Wenn Sie sich dem Schalter nähern, wird er geschlossen. Daher können sie nicht als Sicherheitsendschalter verwendet werden, wenn der Steuercomputer beißt und ein Motor unter Spannung bleibt. Die Schalter werden nur als Sensoren verwendet, deren Status vom Computer überwacht wird. Die zweite Extremstellung beider Motoren hat überhaupt keinen solchen Schalter. Der Bereich der Motorpositionen kann daher nur anhand von Zählimpulsen der Motorsensoren bestimmt werden.
Alle Signale in diesem Abschnitt verwenden 24V. Die folgende Abbildung zeigt den Schaltplan der Elektronik der Motoren und Sensoren im mechanischen Teil von EGIS.
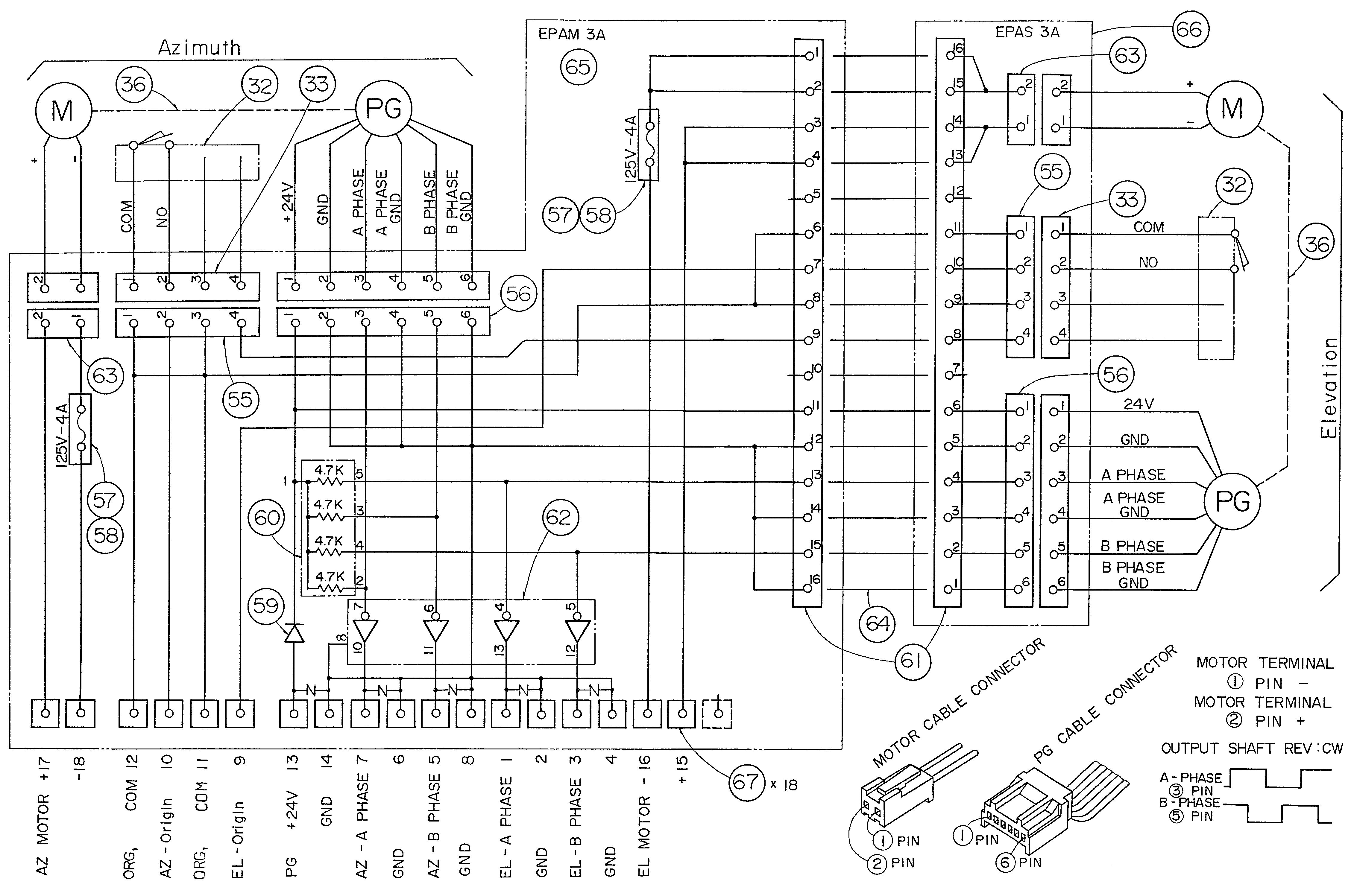
Abb. 2 - Verkabelung der Motorelektronik EPR-203
Aus dem Diagramm geht hervor, dass mehrere Erdleiter (com) an den Ausgangsstecker angeschlossen sind, diese jedoch im Gerät miteinander verbunden sind. Wir können diese Länder mit einem einzigen Kabel an die Schnittstelle der Steuereinheit anschließen. Die Anschlussstifte haben folgende Funktion:
- 2, 4, 6, 8, 14 gemeinsame Masse von Geschwindigkeitssensoren, Masse der 24-V-Stromversorgung für Geschwindigkeitssensoren
- 1 Ausgang, Höhengeschwindigkeitssensor, Kanal A.
- 3 Ausgang, Höhengeschwindigkeitssensor, Kanal B.
- 5 Ausgang, Azimutgeschwindigkeitssensor, Kanal B.
- 7 Ausgang, Azimutgeschwindigkeitssensor, Kanal A.
- 9 Ausgang, Höhennullschalter
- 10 Ausgang, Azimut-Nullschalter
- 11, 12 Ausgang, gemeinsamer Draht von Nullpunktschaltern
- 13 Eingang, + 24V Sensorstromversorgung
- 15, 16 Eingang, Stromversorgung 24V Motorhöhe. +15, -16 = nach oben bewegen; -15, +16 = nach unten bewegen
- 17, 18 Eingang, Stromversorgung 24V Azimutmotor. +17, -18 = nach Westen bewegen; -17, +18 = nach Osten bewegen
Die Ausgangsimpulse der Motordrehungssensoren haben eine Frequenz von ca. 400 Hz und ein Tastverhältnis von 1: 1, gemessen ohne mechanische Belastung und damit bei höchster Motordrehzahl. Die relative Position der Impulse der Sensoren eines Motors ist im obigen Diagramm zu sehen.