

")
")
")
Einführung - wie alles begann
2019 wurde ich der glückliche Besitzer der Egis-Filmanlage. Ich habe das Gerät für eine Werbung aus Italien gekauft. Auf den ersten Blick schien ich ziemlich glücklich zu sein, denn alles schien in einem sehr guten technischen Zustand zu sein. Laut dem Etikett auf dem mechanischen Teil lautet der offizielle Name des Geräts ROBOT POSITIONER EPR-203 und der Hersteller ist das japanische Unternehmen Nagano Japan Radio Co., Ltd. Das war für mich eine kleine Überraschung, denn heute ist der offizielle Hersteller die deutsche Firma EGIS GmbH. Damit waren jedoch nicht alle Überraschungen beendet.

Abb. 1 - Original Steuergerät NITEC EPS-103
Das mechanische Teil wird von einer mit NITEC Satellite Selector EPS-103 gekennzeichneten Elektronik gesteuert. Diese Elektronik benötigt eine Versorgungsspannung von 100 V (120 V) vom Netz. Glücklicherweise enthält das Set auch einen CV 100-Umwandlungstransformator, der die in unserem Land üblichen 240 V in 100 V umwandelt. Aber es gab einen Stecker am Netzwerkkabel, der in unserer Region nicht brauchbar aussah. Der gesamte Rotator konnte also nicht getestet werden.

Abb. 2 - Übertragungtransformator 240V / 100V
Ich fing an, ein bisschen zu suchen und fand heraus, dass in Japan immer noch nur 100 V in den Steckdosen sind. Logischerweise ist die Elektronik an diese Spannung angepasst. Der Umwandlungstransformator von 240 V auf 100 V wurde wahrscheinlich später vom italienischen Eigentümer gekauft. Aber in Italien haben sie die gleiche Spannung in den Steckdosen wie wir, aber leider verwenden sie unterschiedliche Klemmen. So begann ich mich langsam mit der Idee abzufinden, dass ich Anpassungen vornehmen müsste. Ich hatte keine Ahnung, wie umfangreich diese Anpassungen sein würden.
Der erste Schritt bei der Inbetriebnahme des Rotators bestand darin, das ursprüngliche italienische Netzwerkkabel durch ein tschechisches zu ersetzen. Nach dem Öffnen des Transformators CV 100 war ich glücklich. Das italienische Kabel hat die gleiche Farbmarkierung der einzelnen Drähte wie unser tschechisches. Ich konnte ihre Beteiligung also nicht verwechseln. Alles was Sie tun mussten, war sie mit Strom zu löten.

Abb. 3 - Das Innere des Übertragungstransformators CV 100
Der nächste Schritt bestand darin, den Schaltkasten mit der Elektronik der Motoren im mechanischen Teil zu verbinden. Es stellte sich heraus, dass es eine Weile dauern wird, weil es wirklich viele Drähte gibt. Zu diesem Zeitpunkt kannte ich das Design des Geräts noch nicht, wollte aber nicht untersuchen, welche Steckbrücken die Leistung von Motoren und welche Daten zur Steuerung sind und möglicherweise eine Abschirmung erfordern könnten. Ich sagte mir, dass ich für eine Testentfernung von 2 m alle ungeschirmten Drähte mit einem größeren Querschnitt verwenden würde. Insgesamt werden 14 Drähte benötigt.
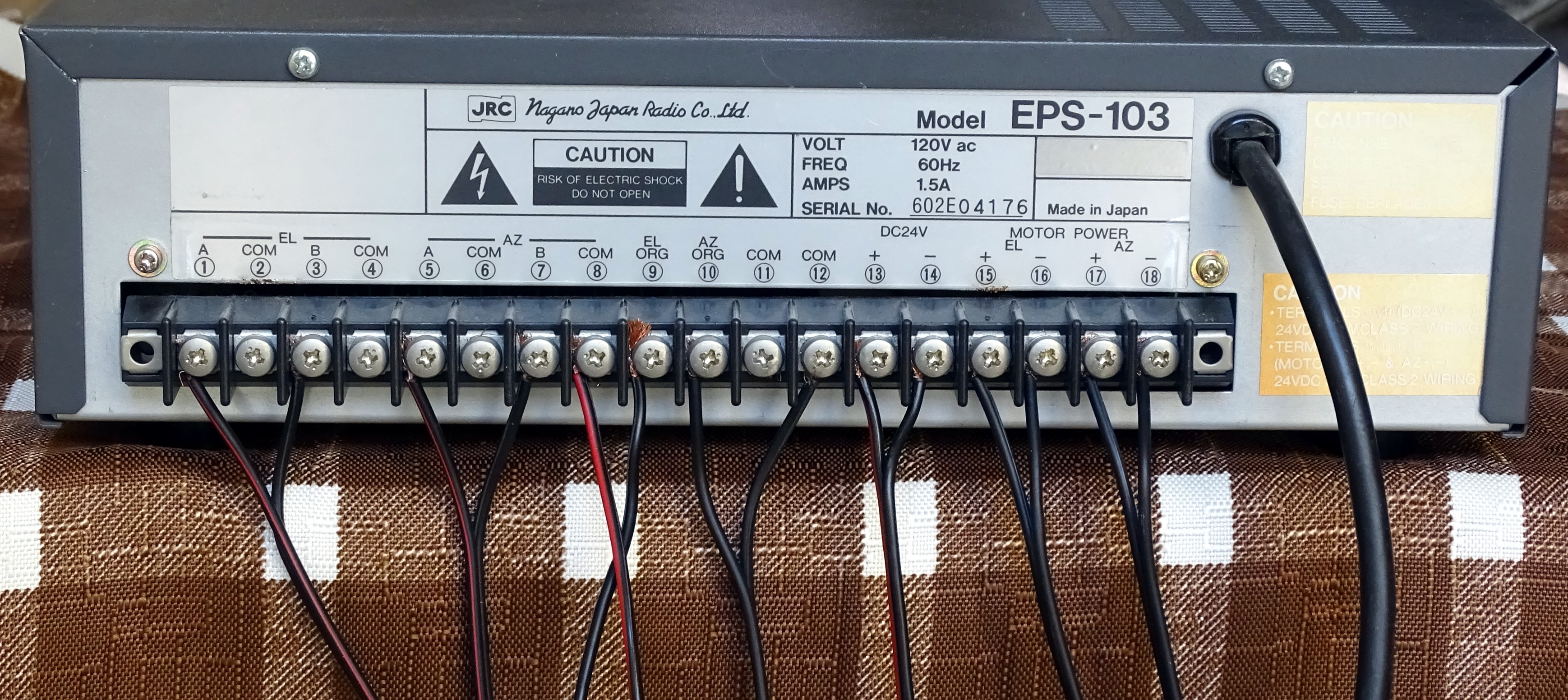
Abb. 4 - Steuereinheitbus NITEC EPS-103
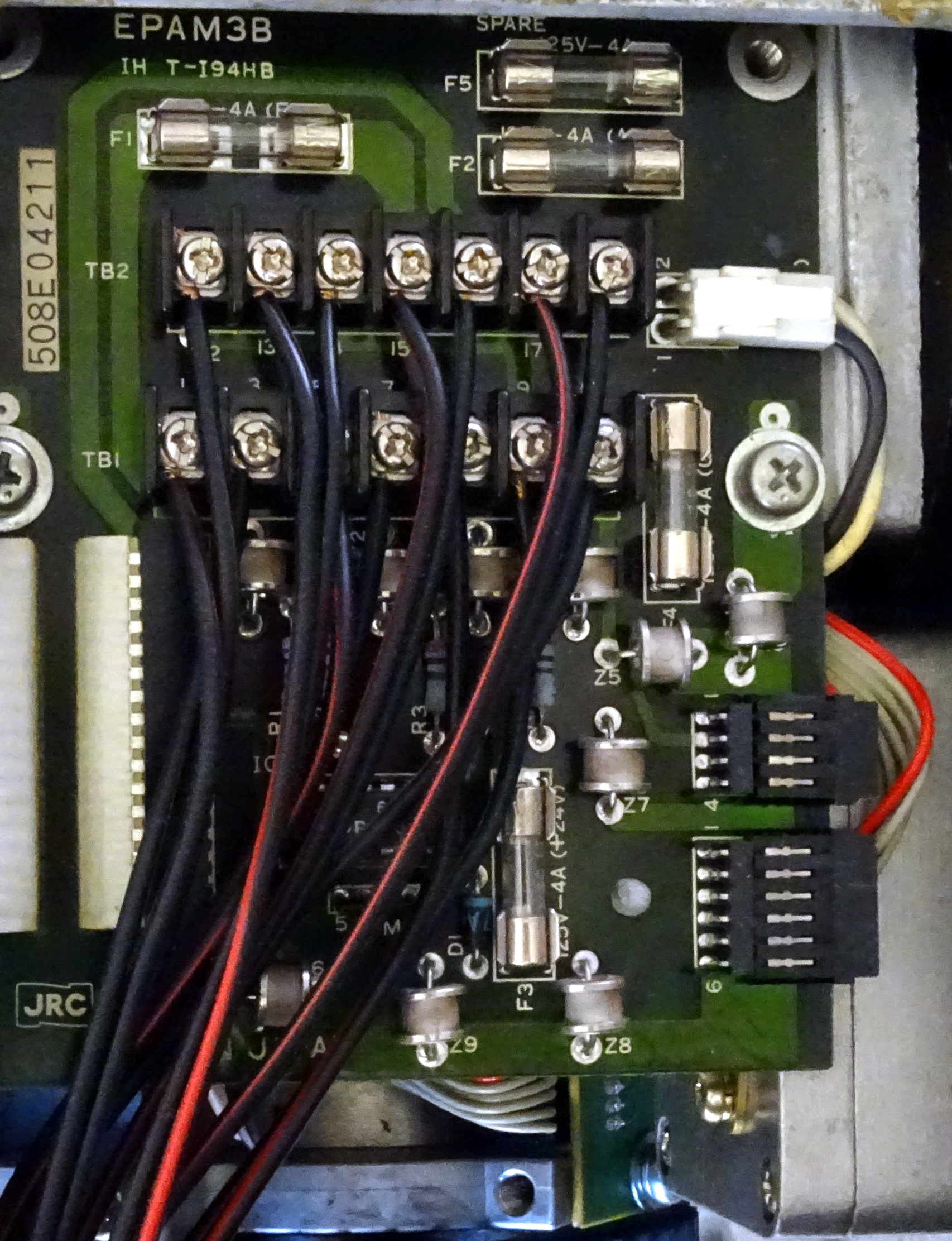
Abb. 5 - Motorelektronikbus EPR-203
Nach dem Einschalten des Geräts wartet es auf die Auswahl eines Satelliten. Laut Handbuch befinden sich 16 vorprogrammierte Positionen im Gerät und weitere 16 Positionen können vom Benutzer programmiert werden. Sie wird mit den Tasten + und - ausgewählt. Nach Auswahl des Satelliten werden die Motoren zunächst auf Null gestellt. Der Höhenmotor bewegt sich zuerst zum Endschalter. Der Motor, der sich horizontal dreht, macht dasselbe. Nach Erreichen der Startpunkte wird das Gerät auf die ausgewählte Position eingestellt. Während der weiteren Verwendung dreht sich der Positionierer gemäß der neu ausgewählten Voreinstellung direkt in die Position. Wieder zuerst Erhebung und dann Azimut.
Nach der ersten Begeisterung, dass alles so funktioniert, wie es sollte, begann ich, das Design mehr zu studieren. Und nach und nach stellte ich fest, dass meine Einstellungen wahrscheinlich nicht aufhören werden, wenn der Netzstecker ausgetauscht wird. Ein sehr überraschendes Merkmal war, dass beide Schießmaschinen nicht gleichzeitig funktionieren. Nach Auswahl einer neuen Position stellte der Rotator immer zuerst die Höhe ein und begann erst dann, sich um die vertikale Achse zu drehen. Das kam mir komisch vor. Dies erhöht die Zeit für die Anpassung an eine neue Position erheblich. Ich öffnete die Kontrollbox und eine große Überraschung erwartete mich hier. Der digitale Teil basiert auf einem 8-Bit-8085A-Prozessor.
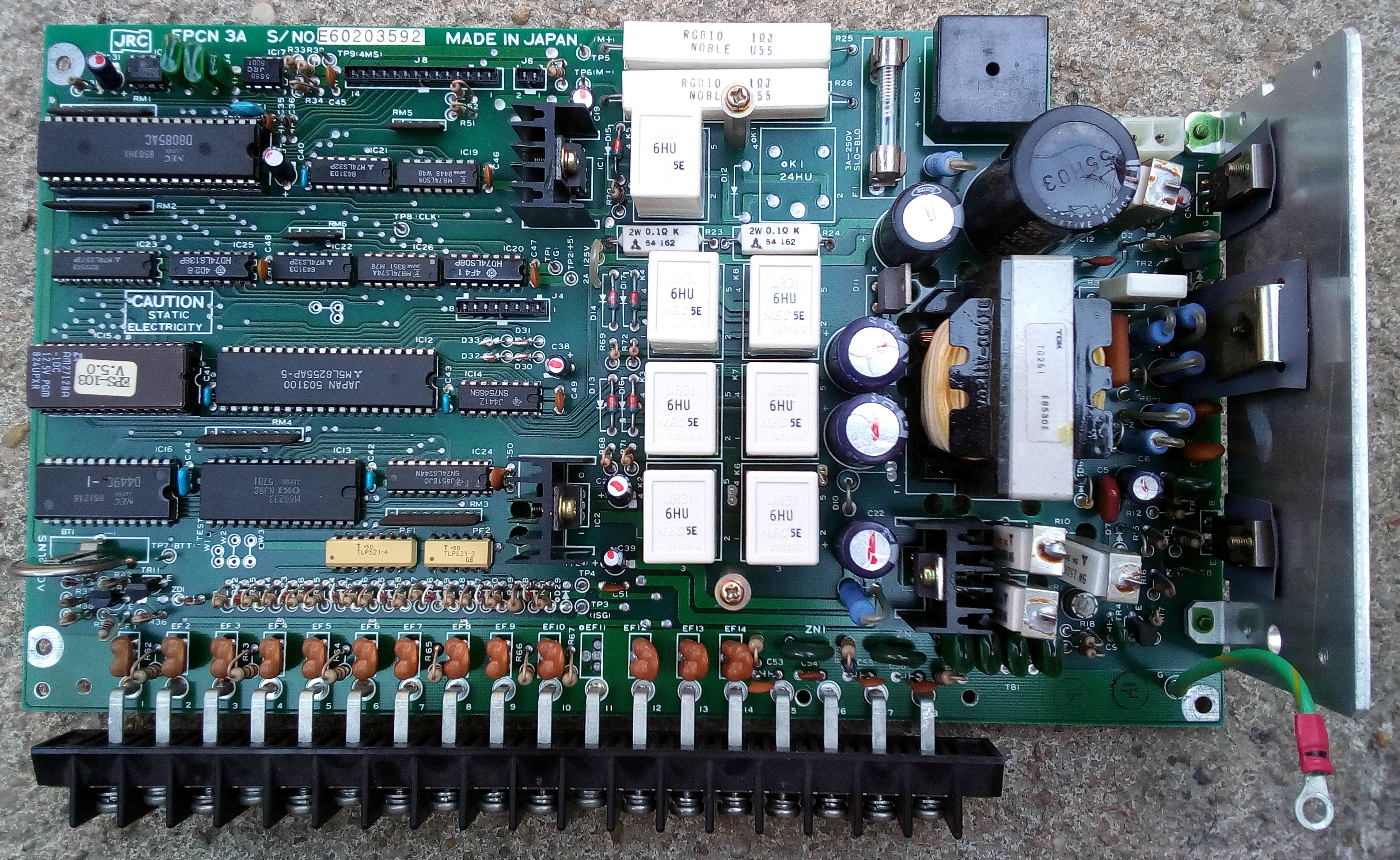
Abb. 6 - Elektronik der Originalsteuerung NITEC EPS-103
Die gesamte Anlage ist technologisch vielleicht 35 Jahre alt. Dies kann der Grund sein, warum die Motoren allmählich starten. Vielleicht, um die erforderliche geregelte Leistung zu reduzieren. Oder der Computer kann die Eingabedaten aller Sensoren nicht gleichzeitig überwachen. Ich weiß es nicht Aber zu diesem Zeitpunkt habe ich eindeutig darüber nachgedacht, die Steuereinheit durch mein Design aus den aktuellen Komponenten zu ersetzen.
Aber die Wahrheit ist, ich weiß nicht wirklich, ob ich die Messlatte zu hoch gelegt habe. Wenn jemand an der Entwicklung teilnehmen möchte, insbesondere am Software-Teil, werde ich die Hilfe definitiv nicht ablehnen. In diesem Fall kontaktieren Sie mich bitte per E-Mail-Adresse