

")
")
")
Введение - как все начиналось
В 2019 году я стал счастливым владельцем стрелкового объекта Egis. Я купил устройство для рекламы из Италии. На первый взгляд мне показалось довольно везучим, потому что все казалось в очень хорошем техническом состоянии. Согласно надписи на механической части, официальное название устройства - ROBOT POSITIONER EPR-203, а производитель - японская компания Nagano Japan Radio Co., Ltd. Что для меня стало неожиданностью, потому что сегодня официальным производителем является немецкая компания EGIS GmbH. Но это не закончило все сюрпризы.

Рис. 1 - Оригинальный блок управления NITEC EPS-103
Механическая часть управляется электроникой с маркировкой NITEC Satellite Selector EPS-103. Эта электроника требует сетевого напряжения 100 В (120 В) от сети. К счастью, в комплект также входит преобразовательный трансформатор CV 100, который преобразует обычные 240 В в нашу страну. Но на его сетевом кабеле была вилка, которая не выглядела как нечто пригодное для использования в нашем регионе. Таким образом, весь ротатор не может быть проверен.

Рис. 2 - преобразовательный трансформатор 240В / 100В
Я начал немного искать и обнаружил, что в Японии до сих пор есть только 100 В в розетках. Логично, что электроника адаптирована к этому напряжению. Преобразовательный трансформатор с 240 В на 100 В был, вероятно, впоследствии куплен итальянским владельцем. Но в Италии у них такое же напряжение в розетках, как у нас, но, к сожалению, они используют разные клеммы. Поэтому я постепенно начал соглашаться с мыслью, что мне придется вносить коррективы. Я понятия не имел, насколько обширными будут эти корректировки.
Первым шагом при вводе в эксплуатацию ротатора была замена оригинального итальянского сетевого кабеля на чешский. После открытия трансформатора CV 100 я был счастлив. Итальянский кабель имеет ту же цветовую маркировку отдельных проводов, что и чешский. Поэтому я не мог спутать их участие. Этого было достаточно, чтобы снова припаять их.

Obr. 3 - Vnitřek převodního trafa CV 100
Следующим шагом было подключение блока управления с электроникой двигателей в механической части. Оказалось, что это займет некоторое время, потому что проводов действительно много. На данный момент я еще не знал конструкцию устройства, но я не хотел исследовать, какие перемычки являются источником питания для двигателей, а какие данные для управления и могут потребовать экранирования. Я сказал себе, что для тестового расстояния 2 м я буду использовать все неэкранированные провода с большим поперечным сечением. Всего нужно 14 проводов.
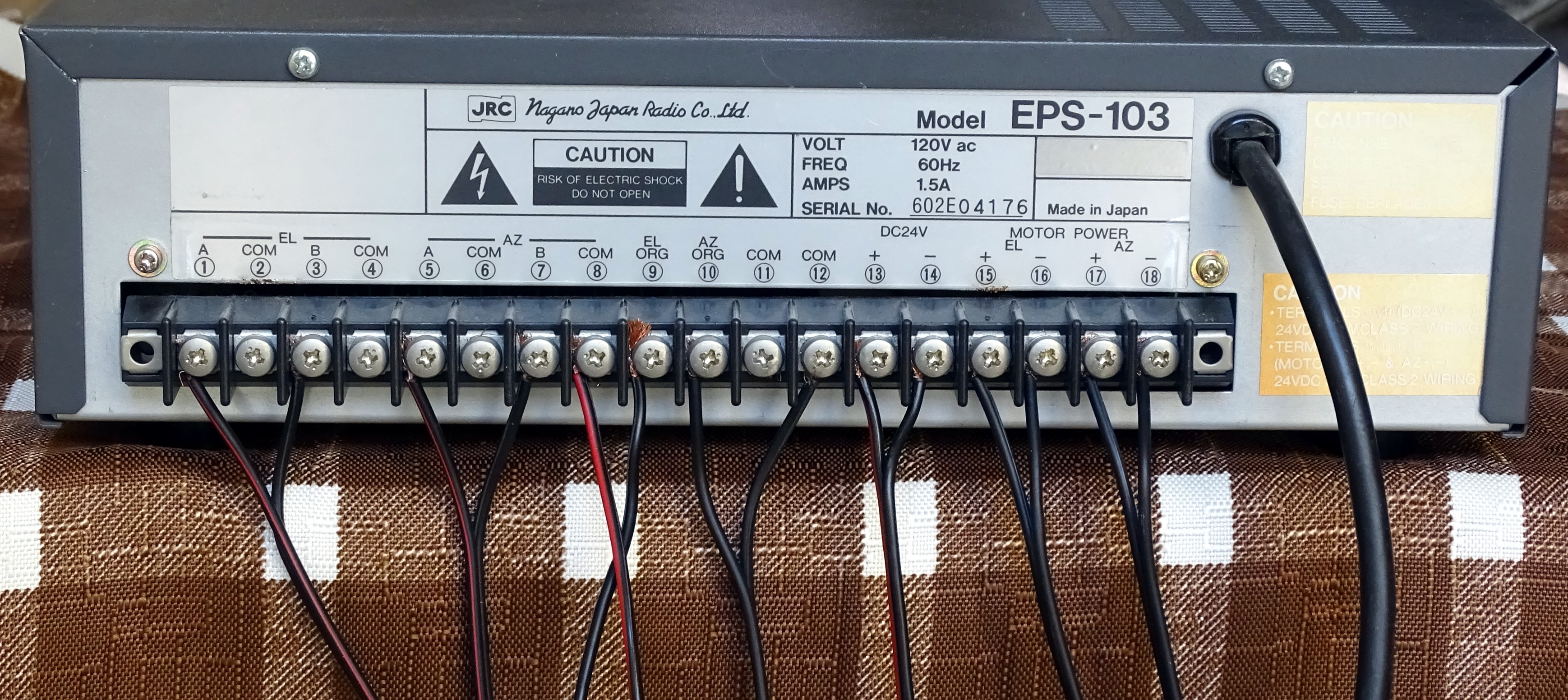
Рис. 4 - Блок управления шиной NITEC EPS-103
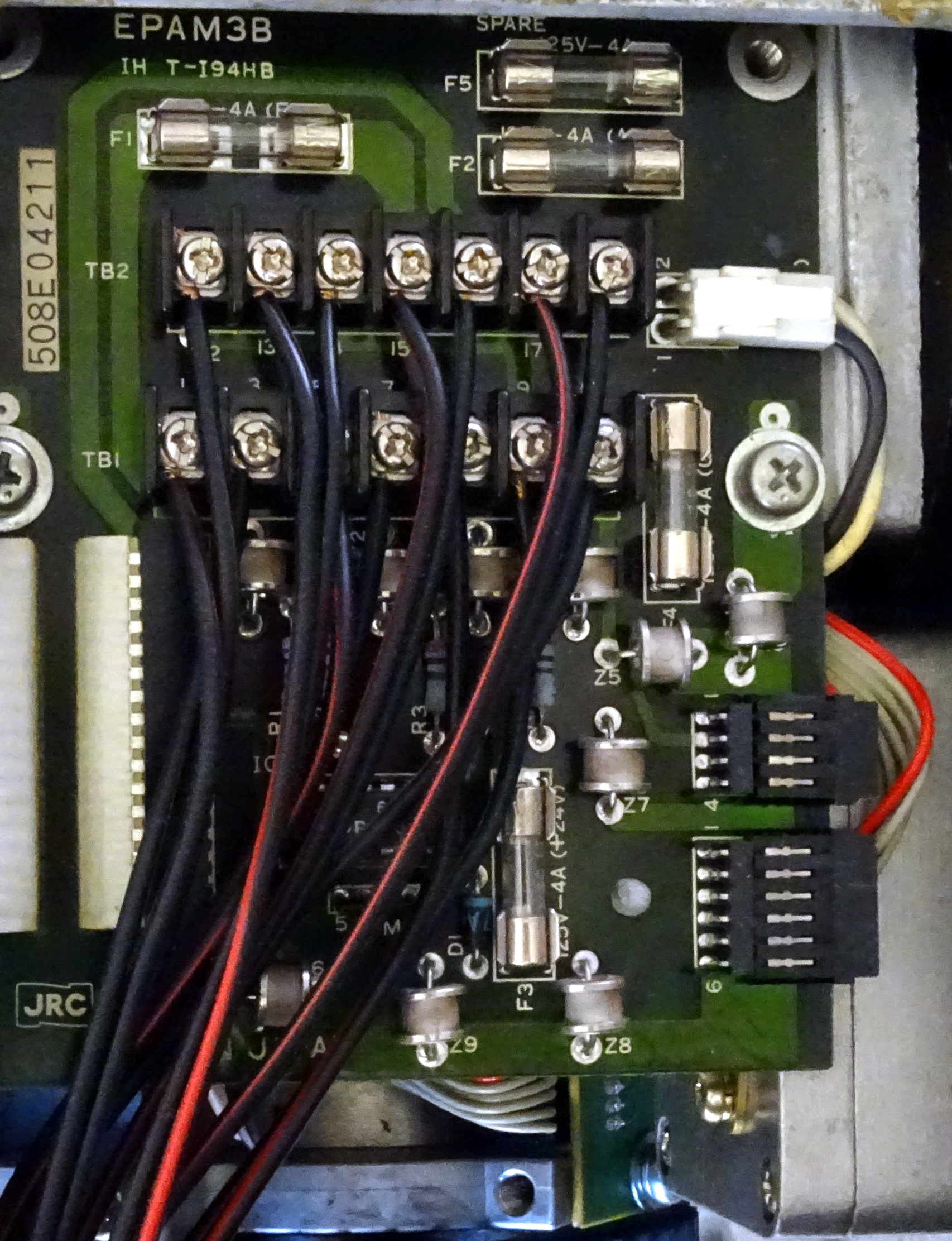
Рис. 5 - Двигательная электроника EPR-203
После включения устройства ждет выбора спутника. Согласно руководству, в устройстве есть 16 предварительно запрограммированных позиций, и пользователь может запрограммировать еще 16 позиций. Он выбирается с помощью кнопок + и -. После выбора спутника двигатели сначала устанавливаются в нулевые позиции. Подъемный двигатель сначала перемещается к концевому выключателю. Двигатель, который вращается горизонтально, делает то же самое. После достижения начальных точек устройство устанавливается в выбранную позицию. Во время дальнейшего использования позиционер вращается непосредственно в положение в соответствии с вновь выбранной предустановкой. Снова сначала высота, а затем азимут.
После первого энтузиазма, что все работает как надо, я начал больше изучать дизайн. И постепенно я обнаружил, что мои настройки, вероятно, не остановятся только при замене сетевой вилки. Очень удивительной особенностью было то, что оба стреляющих двигателя не работают одновременно. После выбора новой позиции ротатор всегда сначала устанавливал высоту и только потом начинал вращаться вокруг вертикальной оси. Это показалось мне странным. В конце концов, это значительно увеличивает время, необходимое для адаптации к новой позиции. Я открыл блок управления, и здесь меня ждал большой сюрприз. Цифровая часть построена на 8-битном процессоре 8085A.
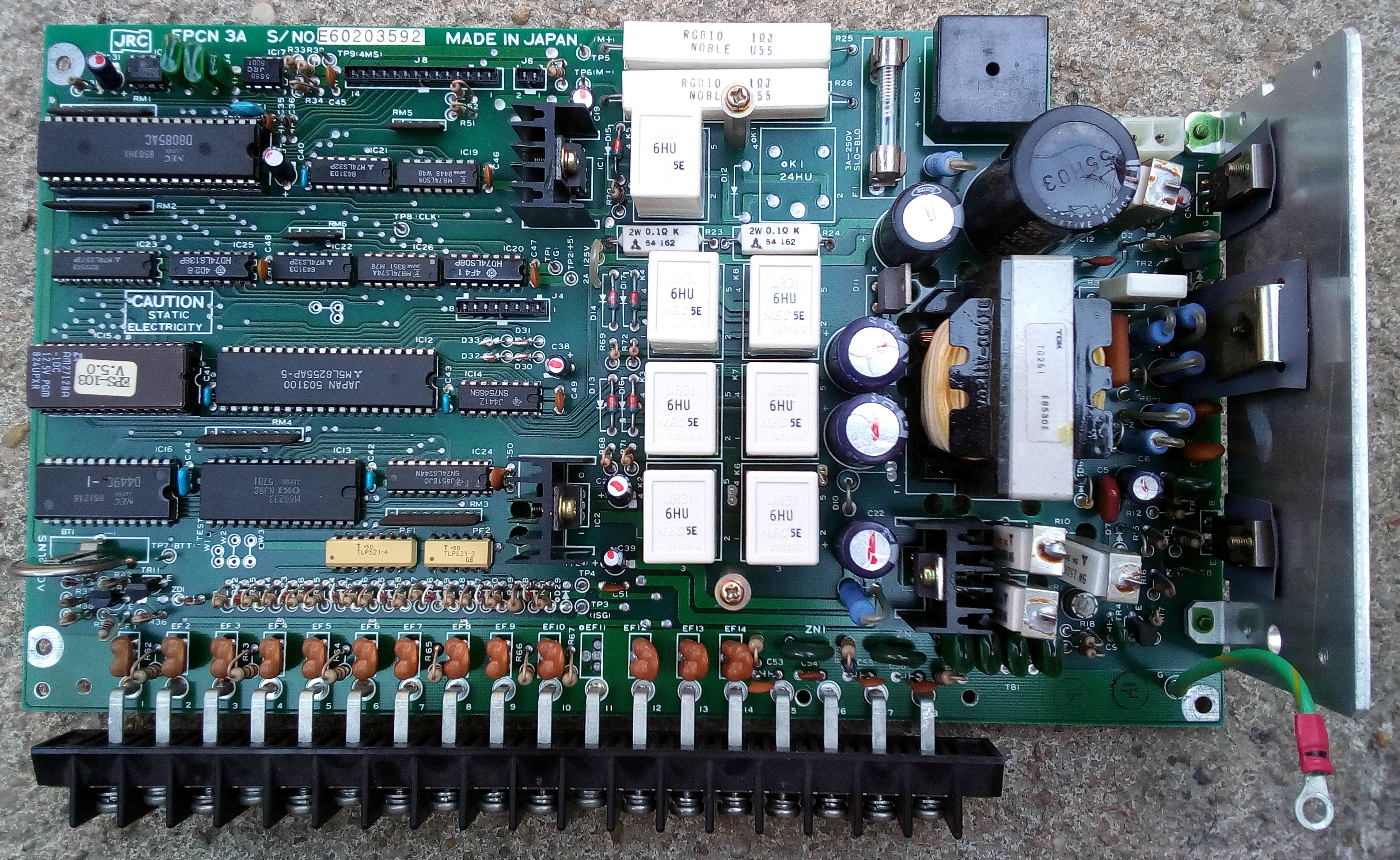
Рис. 6 - Электроника оригинального контроля NITEC EPS-103
Целому объекту технологически возможно 35 лет. Это может быть причиной постепенного запуска двигателей. Возможно уменьшить требуемую контролируемую мощность. Или компьютер не может контролировать входные данные со всех датчиков одновременно. Я не знаю Но в этот момент я явно начал задумываться о замене блока управления своим дизайном из существующих компонентов.
Но правда в том, что я не знаю, установил ли я слишком высокую планку. Если кто-то хочет присоединиться и участвовать в разработке, особенно в части программного обеспечения, я определенно не откажусь от помощи. В этом случае, пожалуйста, свяжитесь со мной по электронной почте