

")
")
")
Схема и описание предлагаемой установки HW 2.0
Пока эта схема только моя идея. Я сейчас готовлю экспериментальный образец. Если кто-то захочет прокомментировать схему советами и комментариями, буду рад. Будь то в комментарии в конце статьи или в дискуссионном форуме здесь. Как только проверю работоспособность дизайна, напишу подробнее здесь.
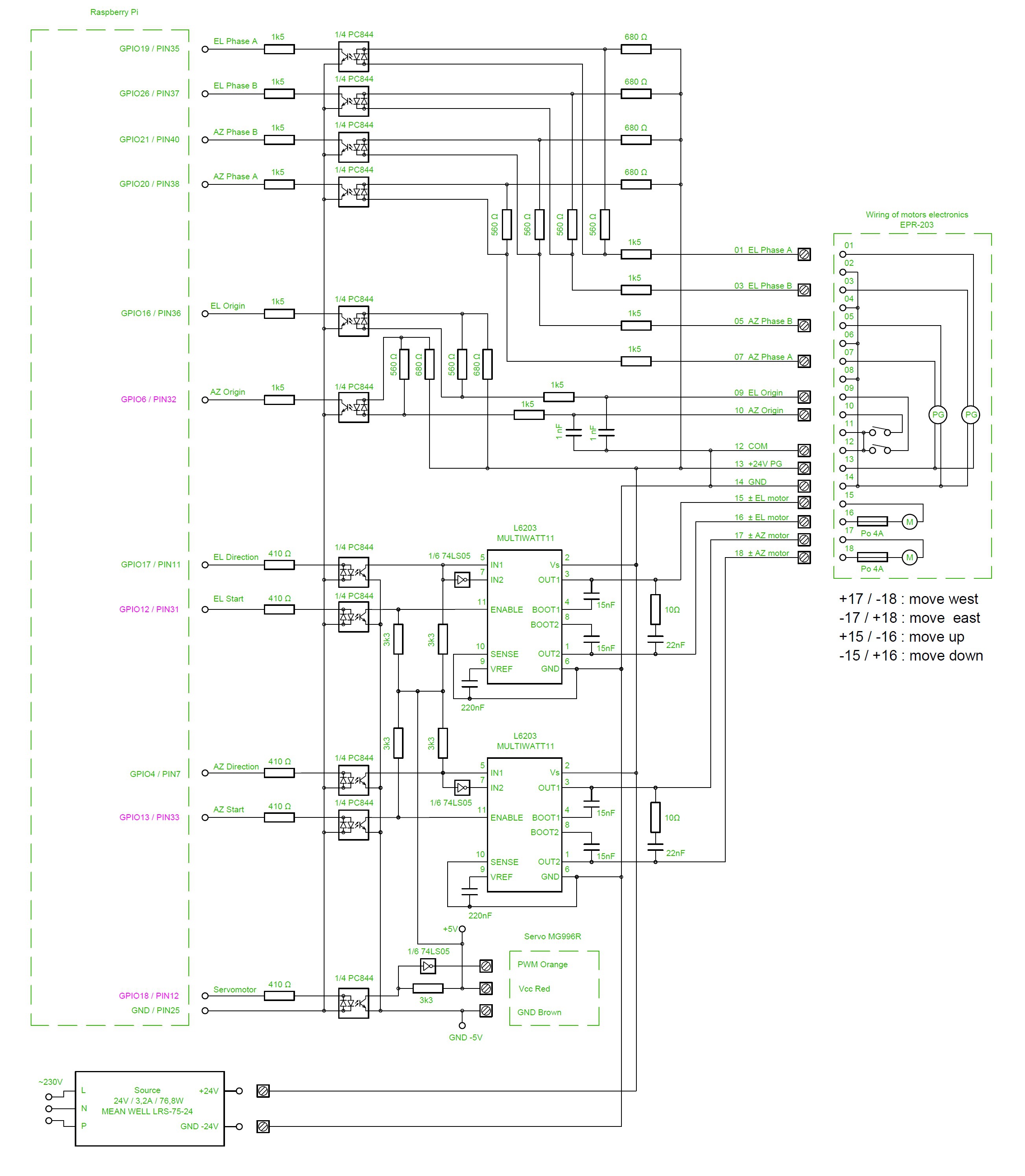
Рис.1 - Схема предлагаемого подключения HW версии 2.0
Подключение к контактам GPIO Raspberry Pi 3 будет отличаться от соединения с HW версии 1.0. Причина в том, что каналы PWM HW и управление серводвигателем имеют фиксированные контакты, но в HW 1.0 эти контакты уже использовались для чего-то другого. Описание разъема GPIO показано на следующем рисунке.

Рис. 2 Описание разъема Raspberry Pi 3 GPIO
Выводы с компьютера перераспределяются следующим образом:
- GPIO12 (Pin32) Включить / выключить двигатель подъема (HW PWM)
- GPIO13 (Pin33) Включить / выключить азимутальный двигатель (HW PWM)
- GPIO17 (Pin11) Изменить направление элеватора
- GPIO4 (Pin7) Изменить направление азимутального двигателя
- GPIO18 (Pin12) Управление серводвигателем (HW PWM).
Входы в компьютер перераспределяются следующим образом:
- GPIO19 (Pin35) Датчик высоты двигателя A
- GPIO26 (Pin37) Датчик высоты двигателя B
- GPIO20 (Pin38) Датчик азимутального двигателя A
- GPIO21 (Pin40) Датчик азимутального двигателя B
- GPIO16 (Pin36) Переключатель нулевого положения для подъема
- GPIO6 (Pin31) Переключатель нулевого положения для азимута.
Упомянутое использование выводов все еще временное, оно может измениться во время проектирования печатной платы благодаря оптимизации.
Выходы Raspberry Pi 3 сначала поступают на изолирующую оптопару, которая должна защищать контакты GPIO с напряжением 3,3 В. Однако в этой конструкции ситуация несколько сложнее, чем в HW версии 1.0. Мост возбуждения мощности L6203 управляется напряжением 5В. Для этого напряжения следует использовать отдельный источник питания. Но пока это кажется мне преувеличением. Я хочу проверить, будет ли этого достаточно, если 5 В не проходит через схемы Raspberry Pi 3. Напряжение питания от источника 5 В сначала поступает на мою печатную плату, а только затем подается на компьютер. Я знаю, что это неправильно. В случае выхода из строя L6203, напряжение 24 В может попасть на Raspberry Pi 3. Но пока я хочу попробовать вот так.
Входы IN1 и IN2 схемы L6203 определяют, какое напряжение будет на каком выходе. Для меня он всегда должен быть в противоположной фазе. Это обеспечивается схемой 74SL05 или одним из ее ворот. Это переключает полярность напряжения на управляемом двигателе. Скорость вращения контролируется входом ENABLE. Принцип ШИМ заключается в том, что напряжение питания подается на двигатель в виде импульсов. Частота этих импульсов должна соответствовать конструкции двигателя, но обычно она составляет от 50 до 200 Гц. Затем чередование этих импульсов определяет скорость вращения двигателя. Преимущество этого метода управления скоростью состоит в том, что на двигатель всегда подается полное напряжение питания, так что усилие двигателя на низкой скорости не уменьшается слишком сильно. Какую частоту я буду использовать в своей конструкции, мне нужно будет выяснить экспериментально, исходя из поведения двигателей. Сдвиг 0% означает, что двигатель выключен. 100% переключение означает, что двигатель работает на полной скорости.
Серводвигатель MG996R может управляться напрямую сигналом 5 В в соответствии со стандартом TTL. Следовательно, элемент переключения мощности не требуется. Конечно, здесь я использовал изолирующую оптопару, но она меняет полярность сигнала. Следовательно, мы должны вернуть его в исходное состояние вентилем из схемы 74LS05. Хотя сервопривод рассчитан на напряжение питания 6 В, даже 5 В достаточно для достаточной мощности двигателя. Принцип управления серводвигателем такой же, как и для ШИМ. Разница в том, что диапазон управляющих импульсов точно определен и относительно узок. Используется частота 50 Гц, то есть длина одного периода составляет 20 мс. Длительность импульса 1,5 мс устанавливает серворотор в среднее положение. Длительность импульса 0,5 мс устанавливает ротор в одно крайнее положение, а длительность импульса 2,5 мс - в другое крайнее положение.
Обработка входного сигнала устроена так же, как в версии 1.0. Сеть входных резисторов питает светодиоды в развязывающих оптопарах. Пока рассматриваю два варианта HW, 24V для EGIS и 36V для тяговых двигателей. Если для обоих напряжений питания можно использовать одну и ту же схему сопротивления, я проверю экспериментально на первом прототипе. Я измерю токи через входные светодиоды оптопар и по найденным значениям приму окончательный вариант. Хотя ничего принципиального в конструкции вводов я не меняю, но хотелось бы проверить, все ли будет надежно работать даже при подключении к EGIS неэкранированными кабелями длиной 10 м. В моем случае такая длина кабелей позволила бы спрятать управляющую электронику на чердаке соседнего дома. Это упростило бы защиту от непогоды.
В следующей таблице перечислены используемые компоненты:
| Номер части | Наименование компонента | Количество |
|---|---|---|
| 19 | 40-контактный плоский кабель IDE | 1 |
| 18 | Raspberry Pi3 + источник + SD-карта | 1 |
| 17 | Источник MEAN WELL LRS-75-24 | 1 |
| 16 | Соединитель MLW40G | 1 |
| 15 | Клеммные колодки ARK500/2EX | 2 |
| 14 | Клеммные колодки ARK500/3EX | 4 |
| 13 | Конденсатор 220nF | 2 |
| 12 | Конденсатор 22nF | 2 |
| 11 | Конденсатор 15nF | 4 |
| 10 | Конденсатор 1nF | 2 |
| 9 | Резистор 3k3 | 5 |
| 8 | Резистор 1k5 | 12 |
| 7 | Резистор 680Ω | 6 |
| 6 | Резистор 560Ω | 6 |
| 5 | Резистор 410Ω | 5 |
| 4 | Резистор 10Ω | 2 |
| 3 | 6x инвертор с открытым коллектором SN74LS05 | 1 |
| 2 | Оптрон PC844 | 3 |
| 1 | Мостовой выключатель питания L6203 | 2 |