

")
")
")
Дизайн HW решения версии 2.0
Примерно через два месяца работы с моим блоком управления позиционером EGIS я расширил исходные требования дополнительными функциями. Это запустило новую версию HW 2.0. Эта версия не будет совместима с HW версии 1.0. Это связано с тем, что новые функции требуют подключения к Raspberry Pi на контактах порта GPIO, которые уже использовались для чего-то другого. Вот почему я остановил разработку HW версии 1.0, и то, что будет продолжать создаваться, постепенно заменит все, что я опубликовал здесь до сих пор. Но так как извиняюсь, что просто выбрасываю уже проделанную работу, то постепенно перенесу в архив. Там он будет доступен всем, кто захочет к нему вернуться и просмотреть.
Поэтому я установил следующие расширенные требования к новому блоку управления:
- Одновременное управление двигателями азимута и угла места
- Для обоих двигателей включите управление скоростью PWM для плавного пуска и остановки
- Завершите конструкцию устройством управления серводвигателем для настройки перекоса LNB
- Обеспечьте правильную работу блока управления даже в случае подключения к позиционеру EGIS с помощью кабелей длиной 10 м
- Управляйте всем блоком управления через Ethernet, по кабелю или через Wi-Fi
- Не мешайте электронике двигателей.
Основной причиной изменения конструкции стала высокая частота вращения обоих двигателей EGIS. После подключения 24В через реле моторы запускались слишком быстро. Это оказало большое динамическое воздействие на все блюдо и его компоненты. Этот толчок передавался обратно на механические компоненты позиционера EGIS из-за качания тарелки. Поэтому у меня было законное опасение, что эти повторяющиеся удары сократят срок службы позиционера EGIS и всей большой тарелки.
Неприятный опыт разрушения первого варианта блока управления показал, что защитить электронику от влажности воздуха - дело непростое. Поэтому я решил попробовать подключить новый блок управления к позиционеру EGIS с помощью кабелей длиной 10 м. Это могло бы позволить возможное размещение в защищенном от прямых погодных условиях месте.
Еще одно абсолютно необходимое дополнение к двухмоторному вращению антенны - возможность установки перекоса для конвертеров с линейной поляризацией. Конечно, это уже не связано с конструкцией позиционера EGIS, необходимо создать отдельный блок записи LNB. Но его управление логически связано с маршрутизацией антенны, и поэтому этот дополнительный блок должен управляться той же программой. Оказалось, что можно купить относительно небольшую, но мощную модель серводвигателя, которая отлично подходит для конструкции LNB съемки. Поэтому я добавил его поддержку в HW ver.2.0.
Блок управления остается моим любимым компьютером Raspberry Pi 3. Старые версии использовать нельзя из-за небольшого количества HW каналов PWM и сервоуправления. Управление аппаратным обеспечением можно заменить программным управлением, но поскольку операционная система Linux Raspbian работает не в режиме реального времени, в любительских условиях будет сложно проверить, достаточно ли производительности старых типов Raspberry Pi для плавного программного управления управляемыми двигателями.
Рис. 1 - Компьютер Raspberry Pi 3
Другим конструктивным блоком остается блок питания на 24 В / 75 Вт типа MEAN WELL LRS-75-24. Его размеры 99x97x30 мм. Он может обеспечивать почти вдвое большую мощность, необходимую для одновременной работы обоих двигателей. Он имеет внутреннюю защиту от перегрузки, перенапряжения и перегрева. Поскольку существует также версия MEAN WELL LRS-100-36 на 36 В / 100 Вт, я рассматриваю возможность одновременной разработки другой версии HW 2.0A для управления обычными тяговыми двигателями. Разница между двумя версиями будет, помимо типа источника, только в цепи входного сопротивления, устанавливающей оптимальный ток через светодиоды развязывающих оптопар. Когда я тестирую прототипы, может оказаться, что можно будет выбрать одно общее компромиссное решение для источников питания 24 В и 36 В. Но пока я предполагаю, что разница напряжений слишком велика и цепи сопротивления должны быть разными.

Рис. 2 - Модуль импульсного питания MEAN WELL LRS-75-24
Из принципа ШИМ-управления скоростью двигателей постоянного тока ясно, что реле, используемые в HW версии 1.0, должны быть заменены полупроводниковыми переключающими элементами. Здесь сложно решить, какую мощность они должны иметь возможность переключать. Стоит ли сосредоточиться только на потреблении двигателей позиционера EGIS или выбрать еще больший запас мощности для возможных экспериментов с двигателями и конструкциями других типов. В связи с необходимостью охлаждения полупроводниковых коммутационных элементов, особенно летом, решил не пробовать ничего экстремального. Я не инженер, который может на бумаге рассчитать необходимые размеры охлаждающих блоков. Мой выбор будет более экспериментальным. Вот почему я остался на земле. Наконец, я выбрал схему L6203, содержащую полный мост переключения мощности с транзисторами DMOS. Он может коммутировать напряжение до 48 В и ток до 5 А. Этого должно быть достаточно с осторожностью, чтобы предотвратить его перегрев.
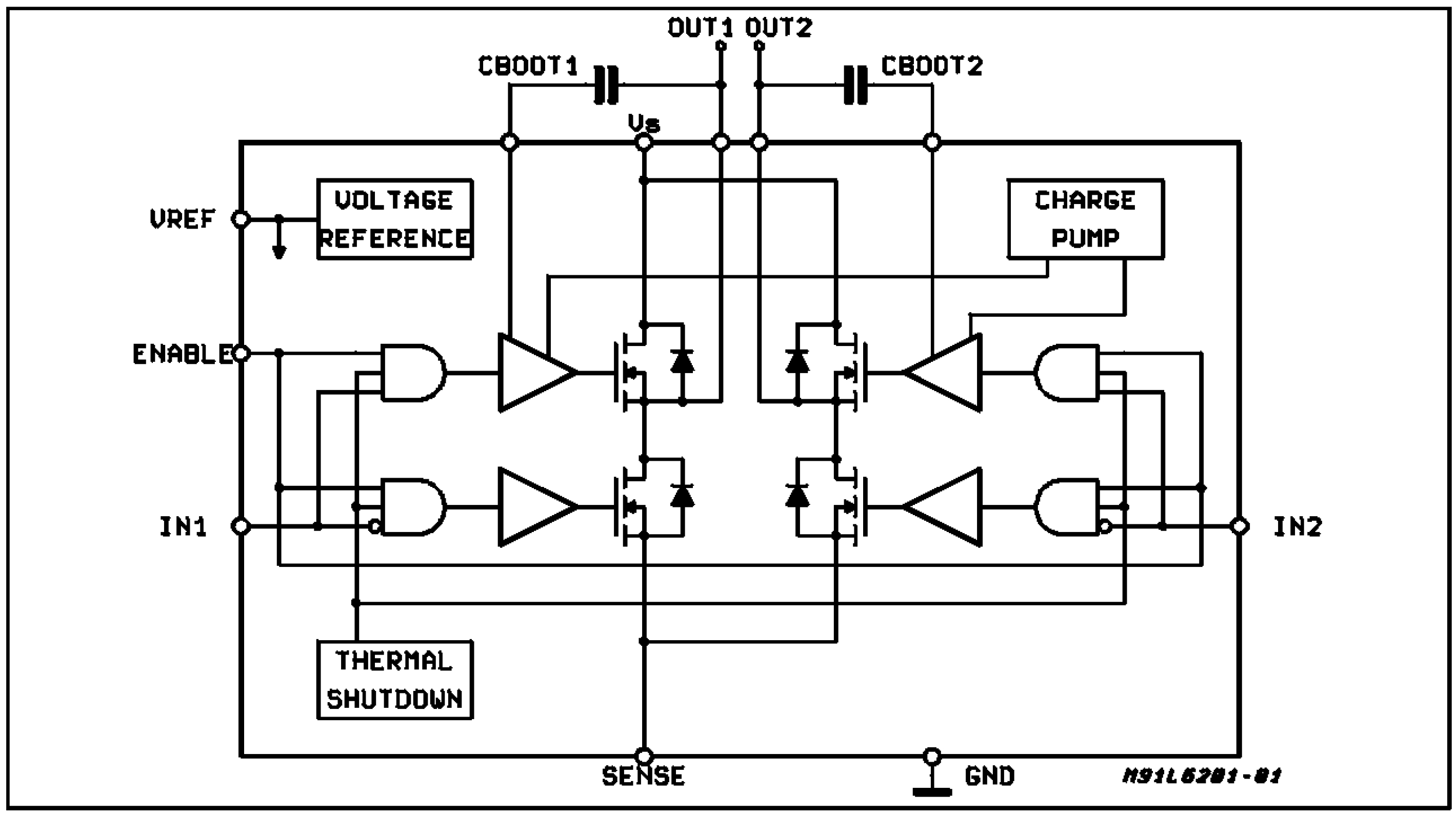
Рис. 3 - Блок-схема драйвера моста L6203
Я выбрал MG996R в качестве серводвигателя для привода вращения LNB. С одной стороны, он содержит металлические шестерни, а с другой стороны, он имеет крутящий момент 15 кг / см при 6 В. Это должно обеспечить достаточную производительность и надежность, хотя я еще не знаю, какое решение конкретно представляет блок настройки перекоса.

Рис. 4 - Серводвигатель MG996R
Это примерно мое текущее представление о новом дизайне блока управления. Если у вас есть небольшие советы, вопросы или комментарии по этому поводу, напишите их в комментариях в конце статьи. Если вы хотите начать более широкое обсуждение, попробуйте дискуссионный форум здесь.